
No Centro de Segurança e Desempenho de Robôs da AI de Tum Mirmi, os pesquisadores Kübra Karacan, Robin Kirschner e Alessandro Melone (ROM da esquerda para a direita) analisaram a sensibilidade dos manipuladores robóticos. | Crédito: TUM
Pesquisadores do Instituto de Robótica e Inteligência de Máquina de Munique, ou Mirmi, na Universidade Técnica de Munique, criaram uma “Árvore dos Robôs”, um novo esquema de avaliação para medir a sensibilidade de robôs autônomos. A sensibilidade é crucial para a interação humana-robô segura e flexível, e não houve uma maneira padrão de avaliá-la, disseram eles.
A Universidade Técnica de Munique (Tum) Os pesquisadores disseram que o novo esquema permitirá a comparação de robôs industriais e, eventualmente, outros sistemas robóticos, como plataformas móveis, humanóides e mãos robóticas.
“Esse padrão pode abrir caminho para um selo de qualidade para o mercado de robótica em rápida expansão”, afirmou Prof. Achim LilienthalVice -diretor de Mirmi e professor de percepção de sistemas inteligentes em Tum. “Conhecer as capacidades de desempenho de um sistema de robôs é uma enorme ajuda para a indústria, onde as empresas desejam fazer o melhor uso possível de sistemas robóticos”.
“A metodologia de teste de Tum Mirmi tem o potencial de se tornar um padrão de teste industrial”, disse ele. “Conhecer as capacidades de desempenho de um sistema de robôs é uma enorme ajuda para a indústria, onde as empresas desejam fazer o melhor uso possível de sistemas robóticos”.
A categorização leva à árvore de robôs
Os pesquisadores começaram examinando e categorizando robôs de braços únicos de vários fabricantes usados na indústria e na pesquisa.
Apesar de frequentemente parecer semelhantes, esses braços robóticos possuem características distintas em seus sensores, motores e sistemas de controle interno. Isso leva a diferenças substanciais em suas capacidades fundamentais: algum excel em poder e precisão, enquanto outros são projetados para interação flexível e sensível com seus arredores e peças de trabalho.
Para ilustrar essas variações e os avanços em andamento na robótica, pesquisadores do Tum Mirmi’s Centro de Segurança e Desempenho de Robô AI criou a árvore dos robôs. Inspirado na Árvore da Vida de Charles Darwin, essa visualização ilustra as diversas adaptações de várias espécies de robôs a seus respectivos habitats.
Os pesquisadores identificaram 25 medições específicas para descrever a sensibilidade de um robô durante o contato físico. Essas medidas ajudam a determinar se a força aplicada a uma superfície se alinha com a força pretendida, por exemplo, ou se um robô pode ferir um humano.
Um diagrama de aranha gerado a partir dessas 25 medições permite uma avaliação visual rápida da sensibilidade de um robô, mesmo para aqueles sem conhecimento especializado.
Com base em seu desempenho, os sistemas robóticos são categorizados como robôs industriais, cobotos, robôs macios e “robôs táteis”. Os robôs cirúrgicos, por exemplo, são avaliados principalmente em sua precisão. Para armazém ou aplicações de fábrica, a ênfase muda para a força e a resiliência – sua capacidade de realizar movimentos repetitivos por períodos prolongados.
“Combinamos métricas de movimento existentes com nossas novas métricas táteis para fornecer a primeira visão geral da totalidade das capacidades básicas para interações físicas de um sistema robótico”, observou o diretor do laboratório Robin Kirschner.
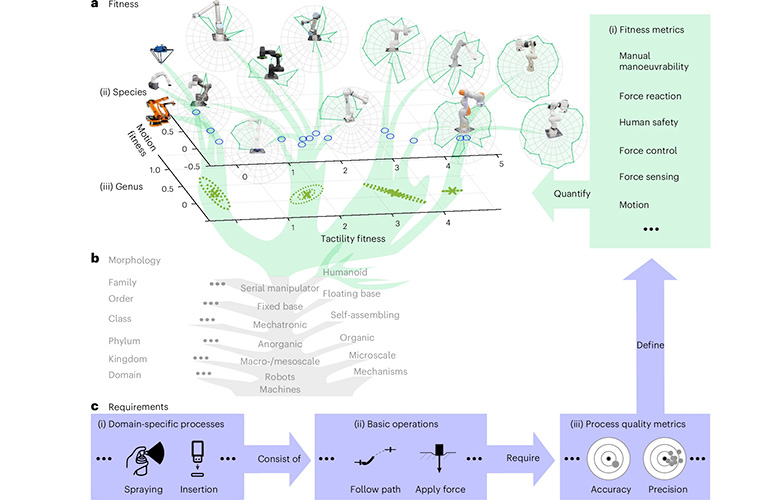
Uma taxonomia que consiste nos componentes baseados na arquitetura do sistema (cinza), no desempenho da modalidade (verde) e no processo (azul). A, A Classificação baseada em Fitness Robot: (i) as métricas de fitness que definem as parcelas de aranha verde, a saber, o espectro de fitness robot; (ii) as espécies de uma modalidade definida pela pontuação geral da aptidão plotada sobre o movimento e a aptidão da tatilidade; (iii) Grupos de gênero agrupando as espécies de robôs em categorias de condicionamento baseado em processos. B, representação hierárquica da morfologia. C, requisitos para automação de processos que são transferidos para as métricas de aptidão do robô necessárias por (i) identificação de processos específicos de domínio; (ii) dedução das operações básicas necessárias; (iii) Métricas de qualidade que descrevem o processo que define as métricas de condicionamento de modalidade necessárias. | Crédito: TUM
TUM poderia ser um centro de teste alemão para robôs
A equipe publicou um artigo de pesquisa Intitulado “Categorizando os robôs por fitness de desempenho na árvore dos robôs” na natureza em fevereiro de 2025.
Prof. Lorenzo Masia. Mirmi se tornará um centro de testes nacionais independentes para robótica. ”
Um conselho de administração de cinco membros supervisiona a estratégia de pesquisa e inovação da TUM MIRMI, conteúdo principal de ensino e estabelecimento de novos grupos focais. A diretoria inclui:
- Masia, diretor executivo
- Lilienthal, vice -diretor e diretor de estratégia e parcerias
- Angela Schoellig, diretora de assuntos da indústria e internacional
- Eckehard Steinbach, diretor de startups e infraestrutura