
O segundo dia do Nvidia GTC está atrás de nós. O destaque do dia foi a principal sessão do CEO da Nvidia, Jensen Huang, na San Jose Arena. A arena foi embalada para as vigas com cerca de 16.000 participantes. Huang se apresentou por quase duas horas e, a certa altura, elevou o Robot da Disney BDX no palco com ele.
O robô da Disney BDX entreteve a multidão, enquanto o CEO da Nvidia, Jensen Huang, discutiu novos produtos de robôs. | Crédito: o relatório do robô
Enquanto a sessão abordou algumas notícias da robótica, o foco principal da apresentação de Huang foi convencer a grande mídia de que o lançamento do Deepseek no ano passado foi realmente uma ótima coisa para os negócios da Nvidia. A NVIDIA está toda sobre o que define como “fábricas de IA”, a próxima iteração de data centers otimizados para a execução de fluxos de trabalho de IA com base na arquitetura da NVIDIA.
Esta parte da palestra destacou o novo Chip Blackwell e o novo software “Dynamo”, projetado para tornar a IA raciocinar 40x mais rapidamente do que as gerações anteriores.
Destaques da robótica da palestra
Huang fez vários anúncios significativos de robótica durante a palestra, começando com a parceria da Nvidia com a GM para desenvolver veículos de última geração, fábricas automotivas e robôs.
Além disso, a Nvidia anunciou que é o GR00T N1 de código aberto. Mais tarde, tive a oportunidade de me sentar com Akhil Docca, gerente sênior de marketing de produtos da Nvidia Omniverse, para discutir o significado deste anúncio.
A NVIDIA projetou GR00T N1 para versatilidade, permitindo um modelo de fundação único para alimentar diversos robôs humanóides. Os desenvolvedores podem ajustá-lo para aplicativos específicos e utilizar seus recursos de geração de dados sintéticos para aprimorar os conjuntos de dados de treinamento. Ao Sourcing Open o modelo em plataformas como abraçar o rosto, a acessibilidade aumenta, diminuindo a barreira para pesquisadores e desenvolvedores.
O modelo avança a Robótica da AI, movendo -se em direção a uma tecnologia generalista capaz de percepção, raciocínio e ação em vários cenários. Essa abordagem visa acelerar a inovação, fornecendo uma estrutura de IA única e adaptável que pode executar várias tarefas, promovendo o desenvolvimento de robôs mais versáteis e inteligentes.
Os desenvolvedores agora podem ajustar o modelo para casos de uso específicos, tornando-o mais adaptável a diferentes aplicações robóticas. O modelo vem com um plano para gerar dados sintéticos, o que ajuda a expandir a diversidade de conjuntos de dados de treinamento e melhorar o desempenho do robô em vários ambientes.
Nvidia anunciou Cosmos na CES no início deste ano, mas no GTC, Huang reiterou a importância de Cosmos para desenvolvimento de robôs. O NVIDIA Cosmos é uma plataforma de modelos de fundação World Gerative World (WFMS) de última geração, tokenizadores avançados, corrimãos e um pipeline acelerado de processamento e curadoria de dados. Ele é construído para o treinamento mundial do mundo e acelerar o desenvolvimento físico de IA para veículos autônomos (AVS) e robôs.
Huang também anunciou Newtonum mecanismo de física extensível e de código aberto que está sendo desenvolvido pela NVIDIA, Google DeepMind e Disney Research para promover o aprendizado e o desenvolvimento de robôs. É por isso que Huang convidou o Disney BDX Robot no palco com ele.
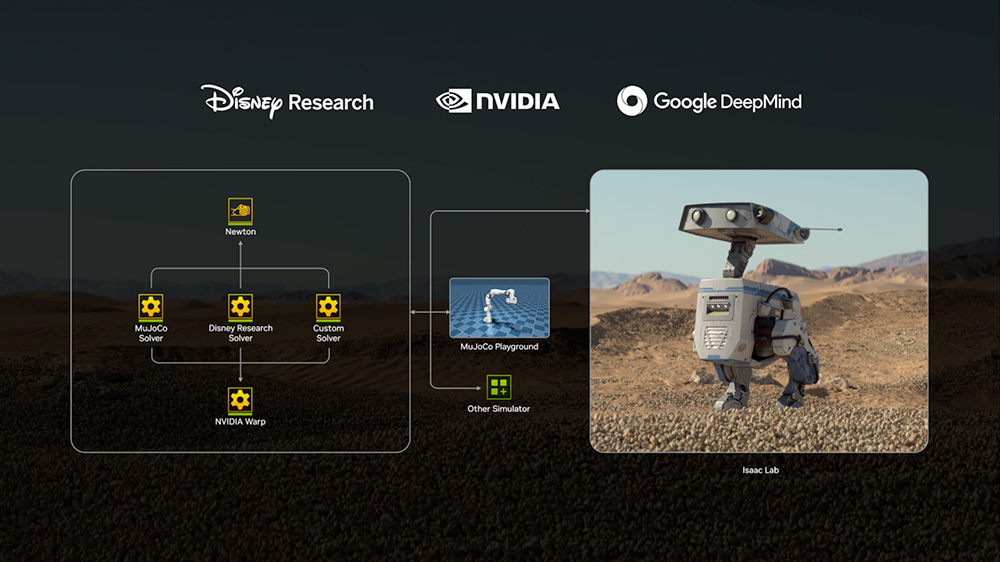
Diagrama de Nvidia Newton. | Crédito: Nvidia
Newton é compatível com o Mujuco, um mecanismo de física de código aberto amplamente usado para pesquisa e desenvolvimento de robótica, envolvendo especificamente a dinâmica complexa e os ambientes ricos em contato.
Nos anúncios de Cosmos e Newton, disse Docca: “A gênese disso era realmente construir o mecanismo de física de código aberto da próxima geração para robôs humanóides. A idéia era poder trazer física aplicável aos robôs humanóides como movimento inercial e atrito, para prever melhor a maneira como os travessios de robôs.
Agilidade Robótica e Boston Dynamics anunciam novos aprimoramentos da NVIDIA
https://www.youtube.com/watch?v=i44_zbewz_w
Ontem, a Agility Robotics anunciou que as empresas também estão colaborando para disponibilizar modelos de dígitos para parceiros através do “Mega”, um Blueprint da Nvidia Omniverse.
O uso de modelos fundamentais é um divisor de águas em termos de rapidez e generalidade de trazer plataformas multifuncionais como o Digit para o mundo. Alguns destaques das notícias de hoje incluem:
- Agilidade tem um acelerador NVIDIA (GPU) em dígitos que executa modelos de IA a bordo para percepção e controles
- Agilidade usa Isaacsim e Isaaclab para treinar seus modelos de IA offline na nuvem
- Agilidade está trabalhando no suporte para a mega plataforma da NVIDIA recentemente anunciada (um simulador de larga escala construído em cima de Isaacsim) para que clientes como Schaeffler possam colocar dígitos em seus gêmeos digitais em escala de instalações
Em um anúncio separado, a Boston Dynamics revelou que expandiu sua colaboração com a Nvidia para construir a próxima geração de recursos de IA para robôs humanóides. Como um dos primeiros adotantes da plataforma Nvidia Isaac GR00T, o Atlas Robot da Boston Dynamics é um dos muitos humanóides usando a plataforma de computação Nvidia Jetson Thor.
O tamanho compacto, o alto desempenho e a eficiência de Jetson Thor permite que o Atlas execute modelos complexos de IA multimodais que funcionam perfeitamente com os controladores de corpo inteiro e manipulação da Boston Dynamics.
Os desenvolvedores da Boston Dynamics e seus parceiros de pesquisa também estão fazendo uma rápida avanço nas políticas de IA de Destreza e Locomotion aprendidas usando o Laboratório Isaac, uma estrutura modular de código aberto para aprendizado de robôs em ambientes virtuais fisicamente precisos, construídos nas tecnologias de NVIDIA ISAAC SIM e NVIDIA Omniverse. As duas empresas estão colaborando para definir os principais parâmetros da plataforma, incluindo arquiteturas funcionais de segurança e segurança, bem como os principais pipelines de aprendizado e visão computacional usando as plataformas de treinamento e simulação da NVIDIA.
Dr. Ken Goldberg se diverte com sua sessão
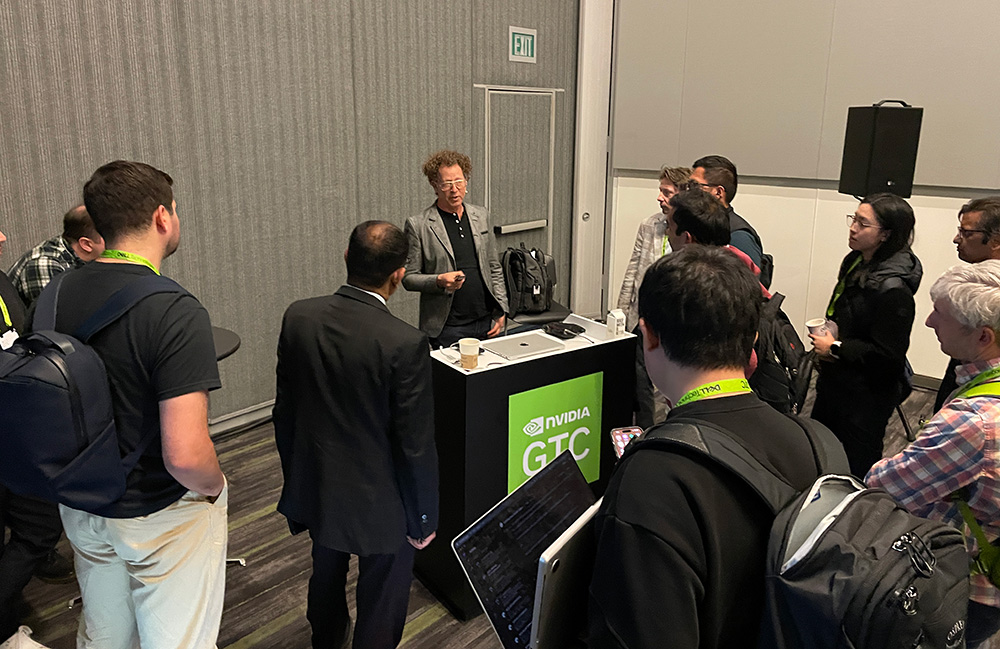
O Dr. Ken Goldberg foi cercado por fãs com perguntas após sua sessão do GTC 2025. | Crédito: o relatório do robô
Uma das sessões que participei à tarde foi o Dr. Ken Goldberg, “Afitando a Real Revolução do Robô requer o fechamento da lacuna de dados”. A sessão foi pura Goldberg, e estava em pé apenas na sala, pois Goldberg nos levou a uma lição de história sobre o desenvolvimento de Dexnet, a gênese da Robótica Ambi e o ritmo da inovação para a IA nos últimos cinco anos. Esta é uma sessão que vale a pena reproduzir, uma vez que o vídeo é público. Goldberg também foi convidado em nosso webinar de previsões de 2025 em janeiro de 2025, assista à repetição aqui.
Nvidia assume a cidade

O CEO da NVIDIA, Jensen Huang, está no palco com o CEO da Hewlett Packard Enterprise, Antonio Neri, na festa depois da GTC, na South Market Street, em San Jose. | Crédito: o relatório do robô
No ano passado, marcou o retorno de um evento físico para o GTC, após a pandemia. Este ano, o evento cresceu, saindo do San Jose Convention Center (SJCC) e enchendo as ruas para blocos ao redor da SJCC. O evento bloqueia completamente a área no mercado sul entre a First Street e a Almaden Blvd. No almoço, a área está cheia de caminhões de comida para alimentar os mais de 20.000 participantes e, à noite, há um mercado noturno com vendedores de comida e artesanato e um palco com música ao vivo para entreter a multidão.